① 概要
外骨格型ロボットは、人体に装着される電動アクチュエータの動力を用いた外骨格型の装置であり、リハビリ、介護、重量物の運搬等の分野で利用されています。
しかし、開発段階においては、幾つかの設計課題が存在します。
ロボット動作のアクチュエータとして人工筋肉が利用されますが、その設計においては実際の人間の筋肉と腱の機能、人間動作パターンを把握する必要があります。それに加え、ロボットから人間への影響、必要なパワーの推定、ロボットの軽量化、神経系 - デバイスの情報交換、人間 - デバイスのインターフェースの不快感等という多くの課題が並んでいます。
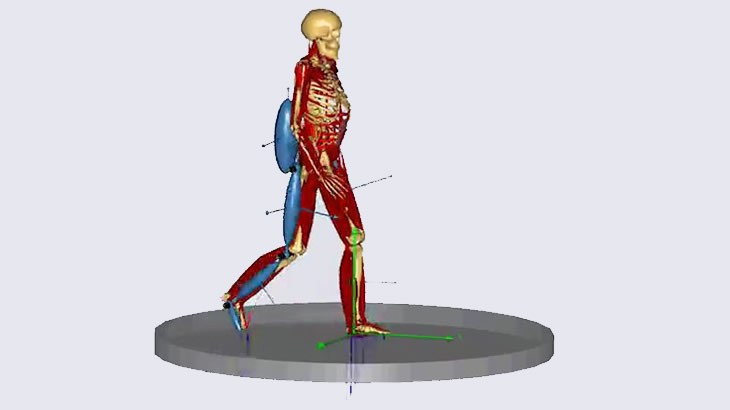
上述の設計課題の一部に対してこの適用例では、下肢の関節の屈曲伸展動作を支援する、外骨格型ロボットをAnyBodyでモデル化することを目的とします。ソフトで提供されているサンプル歩行モデルを用い、その装置の利用の有無で、下肢の筋肉活動と動員(筋肉の使い方)がどのように変化するかを評価します。
データ :
・ 歩行周期=1.2秒
・ 被験者の体重=65㎏
・ 身長=170㎝
・ 重力=9.81m/s2
② 外骨格型ロボットのモデル化
■ 床反力
このモデルでは、被験者の歩行動作に応じての床反力がモーションキャプチャーと同時に測定されています。しかし、ロボットを人体モデルに装着すると、人体-ロボットを含むモデルの重量が増えるので、サンプル歩行モデルの床反力値は妥当ではなくなるため、利用できません。
代わりに、"GRFPrediction"というAnyBodyの床反力推定機能を用います。
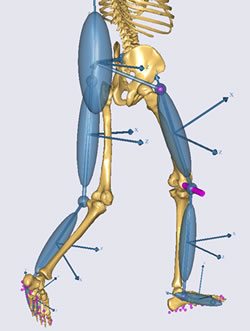
■ ロボット
ロボットは、7セグメントで単純に定義し、12㎏とした質量をそれらのセグメントに分配させます。
また、結合条件として、人体モデルの脚の外転/外旋の動作を拘束しないようにジョイントを定義しました。
股関節 : ボールジョイント
膝 : 回転ジョイント
足首 : ボールジョイント
ロボットの動作は、解析の入力条件としてインプットする必要があるので、人体モデルの歩行動作に従う動作になるように拘束条件を定義します。
■ ロボットの作動力
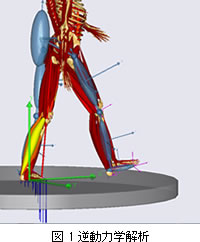
ロボットの作動力として、ロボットのジョイントに、作動トルクを付加します。 トルクを決定するために、一旦出力を無効にしたロボットを人体モデルに装着し、逆動力学解析をおこないます。(図 1)
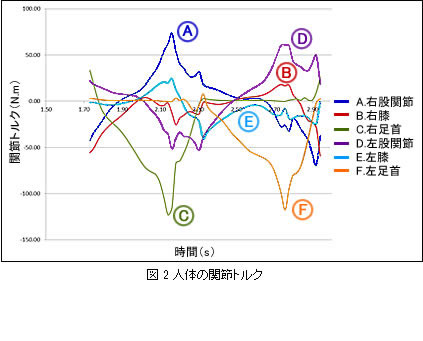
逆動力学解析の解析結果から、ロボットの質量を考慮した場合の人体の関節トルクが得られます。(図 2)
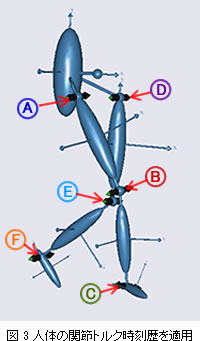
ロボットのジョイントを作動トルクとして、解析した人体の関節トルクの時刻歴を適用します。(図 3)
③ 結果
右のアニメーションは、トルク仕様のロボットを装着した場合の歩行結果となります。
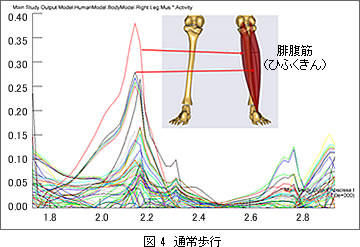
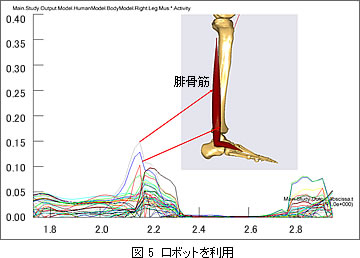
筋肉の活動は、ロボットを利用しない状態ではカラーコンターが腓腹筋の所に見えますが、ロボットを利用すると、腓腹筋のコンターはほとんど変化しないため、筋活動が減少したことが分かります。
右の図は、健常者において、ロボットを装着しない通常歩行の場合(図 4)と、ロボットを利用した場合(図 5)の、右脚の全筋の活動量を比較した結果です。
まず、全体的な筋活動量が減少し、最大値が38%から15%まで下がることが分かります。そして、全体的な筋肉動員パターンが変わり、主要な活動部位は、腓腹筋ではなく、腓骨筋がメインとなっていることが分かります。 また、図 5のグラフの2.4~2.6秒での時刻を見ると、ロボットの影響により、ほとんど活動しない筋肉があることがわかります。
図では示していませんが、関節の反力も低下する結果を得ています。
図 5は、ロボットによる理想的なサポート状態による解析のはずですが、右脚の筋活動量は完全にゼロになっていないこともわかります。それは、脚関節の外転/外旋の動作を支援していないためです。いくつかの共通な筋は、これらの動作に必要なため、筋活動量は残ります。
④ まとめ
ある関節支援パターンに対しての筋肉動員(筋肉の使い方)と筋活動量(あるいは人体の反応)を推定することが可能となりました。解析に役立つAnyBodyの特長は、以下のとおりです。
・モデル化の自由さ
・冗長システムのシームレス対応
・検証されている床反力推定機能
・多数の人体モデル検証スタディ計算時間が短い
さらに外骨格型ロボットの設計課題において活用するには、以下の解析をAnyBodyでおこなうことも考えられます。
・ロボット/人体のインターフェースをより現実にモデル化
・ロボット作動力パターンを利用可能な技術に合わせて設定
・異なる支援パターンの解析
・筋肉が欠損した場合の解析(障害者)
・歩行以外の動作種類の解析
・異なる個体群の解析
