トルク無し
トルク有り(OnOff切り替え)
トルク有り(常時有効)
解析結果
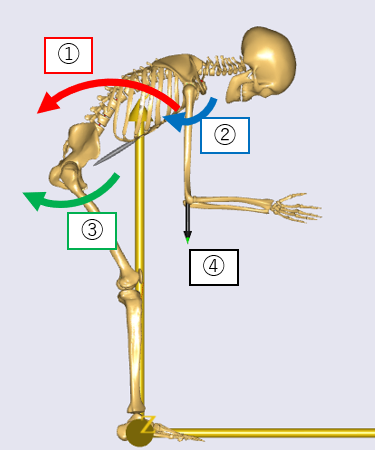
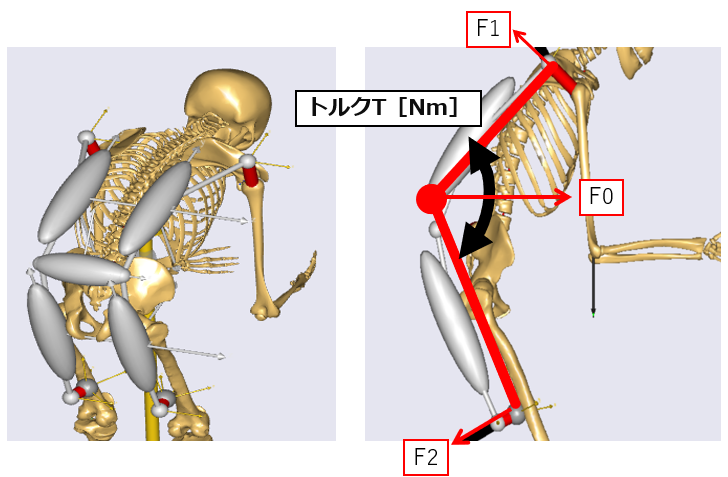
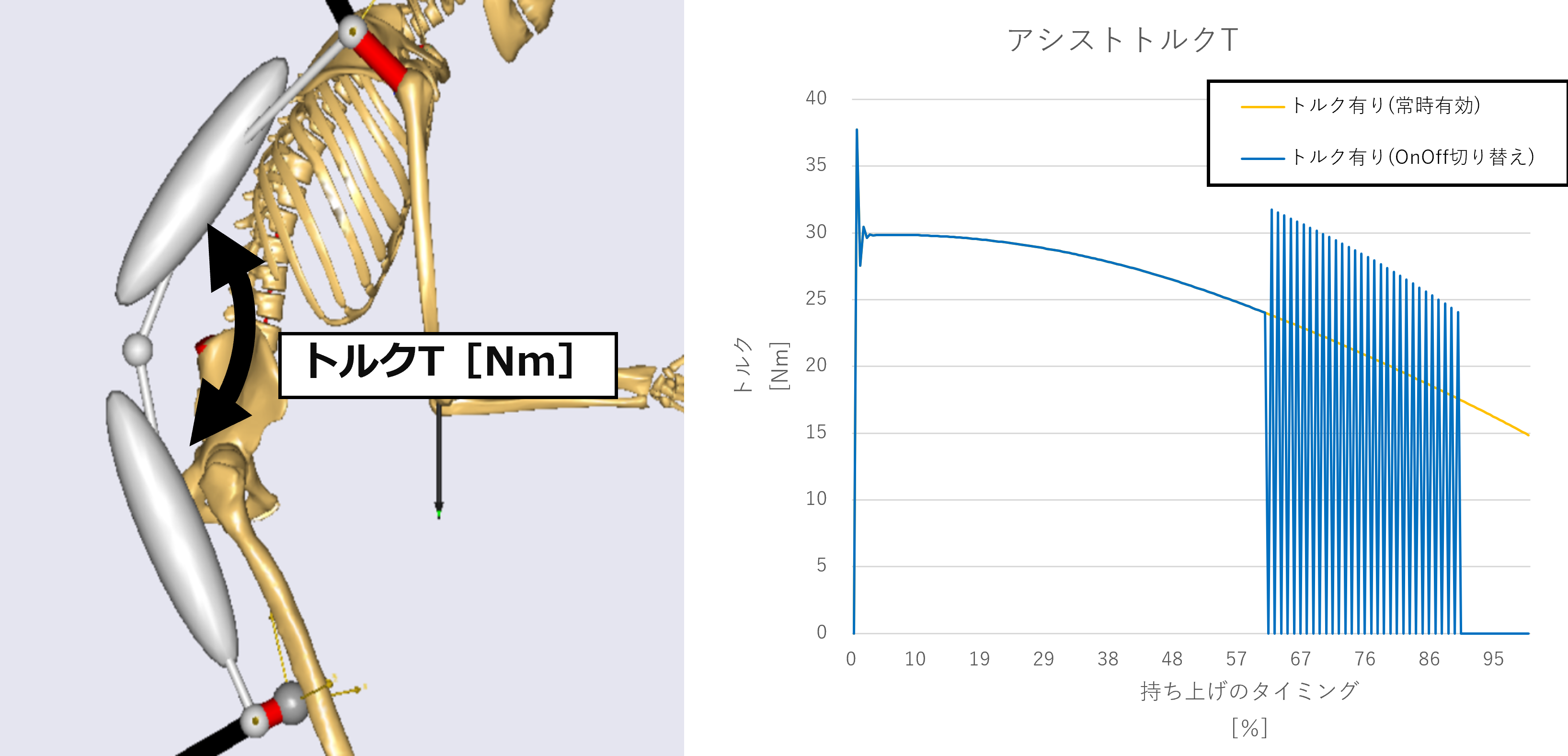
アシストトルク
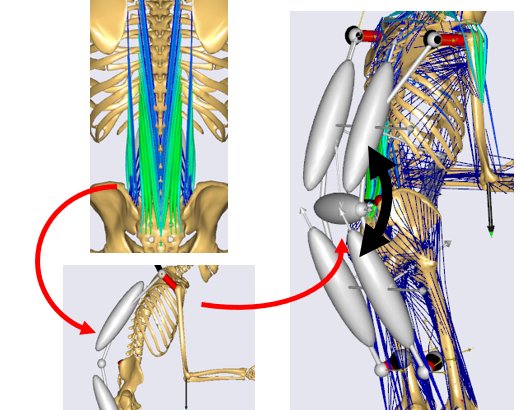
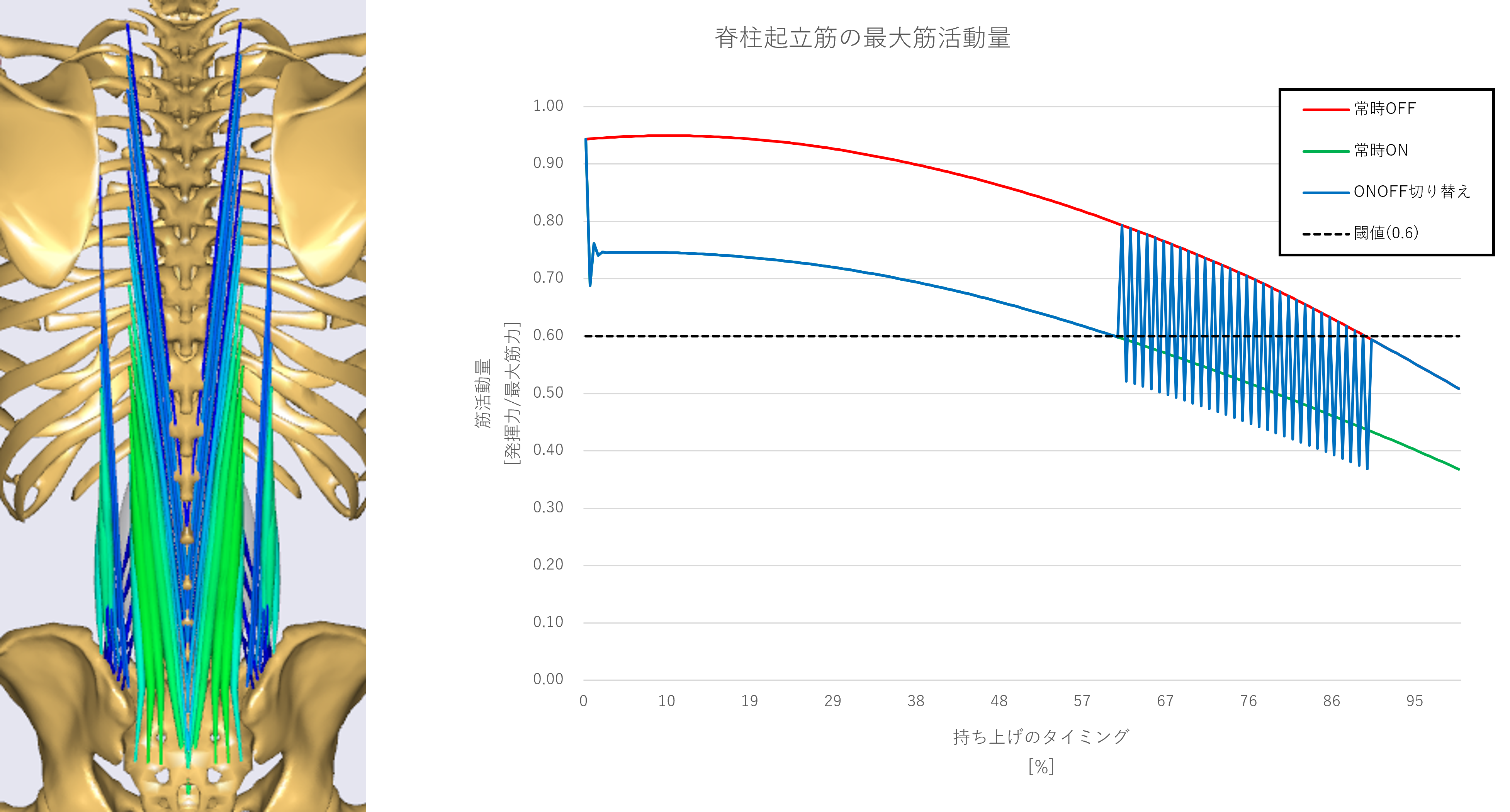
脊柱起立筋の最大筋活動量
・最初の1ステップ目は前ステップの筋活動量がないためアシストトルクが作用しません。
また、最初の1~数ステップはアシストトルクが収束するまで、下記の2~3ステップが繰り返される場合があります。
1ステップ:アシストトルクがないため、筋活動量はデバイスがOFFの場合と等しくなる
2ステップ:1ステップを元に計算されたアシストトルクが付与され、強く作用するため、筋活動量は小さくなる
3ステップ:2ステップで下がった筋活動量で計算されたアシストトルクが付与され、筋活動量は大きくなる
・"ONOFF切り替え"では、閾値付近になるとアシストデバイスのON/OFFが繰り返されることによって、筋活動量値が上下に振動します。
腰椎圧縮力
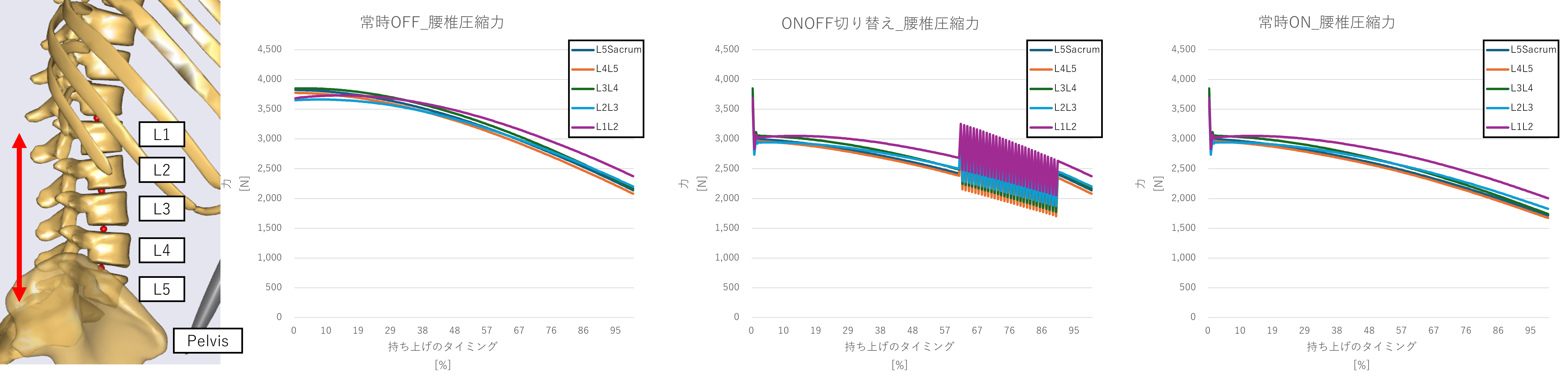
・脊柱起立筋の活動量の変化に連動して、椎間に生じる圧縮力の減少
が確認されます。