お知らせ
本事例を発展させた内容を2022年6月25・26日に福岡国際会議場で開催された第34回バイオエンジニアリング講演会にて発表しました。
概要
私たちは特に意識することなく歩く・座る・立つといった様々な動作を普段の生活で繰り返しています。これらの動作は私たちの身体に存在する600以上の筋肉をうまく制御することで行われていますが、「どうやって600以上もの膨大な筋を制御しているのか」は、現在でも明確にはわかっていません。この問題はベルンシュタイン問題と呼ばれる身体運動学分野の難問として知られています。
近年、ベルンシュタイン問題をうまく説明できる理論として筋シナジー仮説が注目を集めています。筋シナジー仮説では「600以上の筋が1つ1つ制御されているわけではなく、少数の機能的に連結した筋活動の塊である『筋シナジー』が制御されている」と考えます。動作中の筋シナジーは非負値行列因子分解(Non Negative Matrix Factorization: NNMF)などを用いた筋シナジー解析によって同定することができます。
筋シナジー解析にはEMGデータを用いることが通例ですが、EMGデータの代わりに筋骨格モデル解析によって得られた筋活動量データを活用することも理論上は可能です。しかし、筋骨格モデルで算出された筋活動量データを活用して筋シナジー解析を実施した前例はほとんどありません。もしも、筋骨格モデル解析で得られた筋活動量データを使用して筋シナジー解析が可能であるならば、EMGの計測が難しい環境・動作課題での筋シナジー解析が実施できるなどの利点を得ることができると考えられます。そこで今回はAnyBodyを用いて算出した筋活動量データを使用して、筋シナジー解析ができるのかを検証してみます。
解析ステップ1 AnyBodyによる筋活動データの取得
AnyBodyを用いて歩行動作時の筋活動量を計算します。今回は筋シナジー解析の対象となることの多い、下記の26筋の筋活動量を解析データとして使用しました。
前脛骨筋・腓腹筋・ヒラメ筋・腓骨筋・内側広筋・外側広筋・大腿直筋・縫工筋・大腿二頭筋長頭・半腱様筋・長内転筋・大腿筋膜張筋・大殿筋・中殿筋・外腹斜筋・内腹斜筋・広背筋・腸腰筋・腹直筋・脊柱起立筋・上腕二頭筋・上腕三頭筋・三角筋・僧帽筋・胸鎖乳突筋・板状筋
解析ステップ2 筋シナジー解析の実施
筋シナジー解析では「筋活動量は少数の機能的に連結した塊である『筋シナジー』によって生み出されている」と仮定します。筋シナジーは、各筋がどのくらい連動して活動しているかを表す筋結合パターンと、筋結合パターンが動作中のどのタイミングで活用されているのか表現している時間変動パターンの2つの要素で構成されると考えられています。
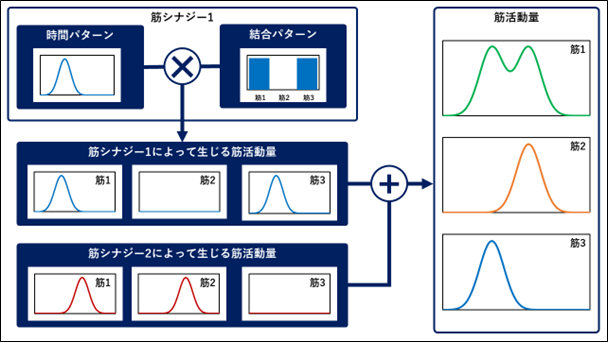
図1. 筋シナジーと筋活動量の関係性
しかし、現代の計測技術では動作中の筋シナジーを直接計測することは不可能です。そこで重要な役割を担うのがNNMFです。NNMFを用いることで筋活動量データから筋シナジーの筋結合パターンと時間変動パターンを同定することができます。
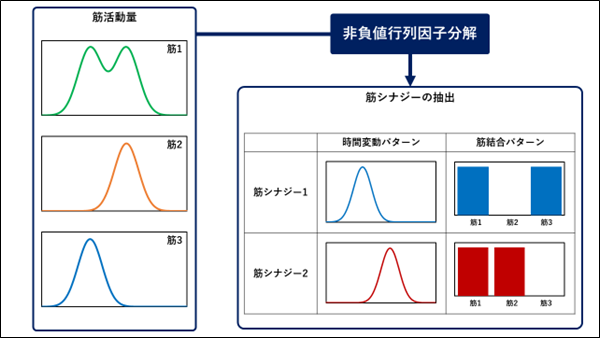
図2. NNMFによる筋シナジーの同定プロセス
今回は、このNNMFをAnyBodyの解析によって取得した筋活動量データに適応することで筋シナジー解析を実行します。
結果
AnyBodyで算出した筋活動量データにNNMFを適用したところ、5つの筋シナジーが同定されました。同定された筋シナジーの筋結合パターンと時間変動パターンを下記に示します。
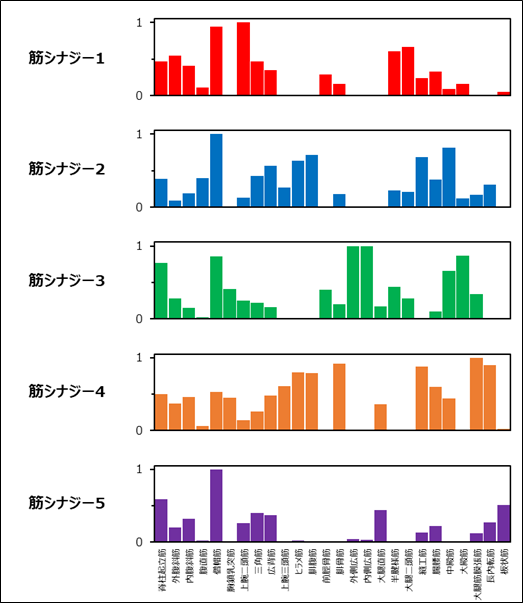
図3. 同定された筋シナジーの筋結合パターン
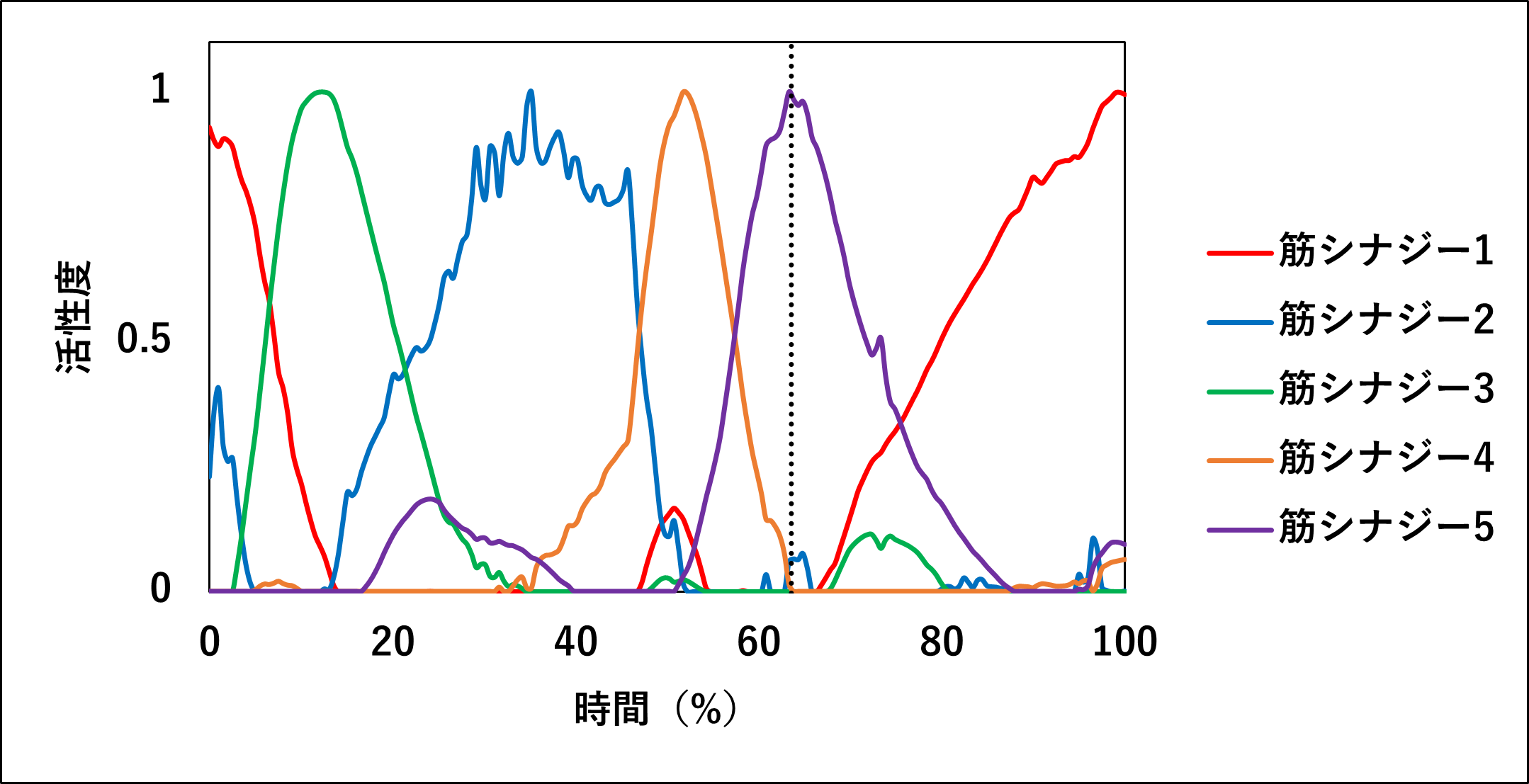
図4. 同定された筋シナジーの時間変動パターン
解釈
これまでにEMGデータを使用して筋シナジー解析を実施した研究を参照すると歩行動作では3~5個の筋シナジーが同定されることがわかっています。筋シナジーの数だけで比べると筋骨格モデル解析ベースの筋シナジー解析はEMGベースの筋シナジー解析の結果と一致した結果が得られていることがわかります。
今回の検証課題の意義
今回の検証によって筋骨格モデル解析ベースの筋シナジー解析であっても動作時の筋シナジーを同定できることがわかりました。今回の検証は予備的なものでしたが、この検証を深めていくことで下記のことが可能になると考えられます。
・EMGの計測が難しい環境・動作課題での筋シナジー解析の実施
・筋骨格モデルをベースとした神経系の機能解明
・筋シナジー情報を基にしたロボットスーツなどのデバイス開発