クローズドチェインとは?
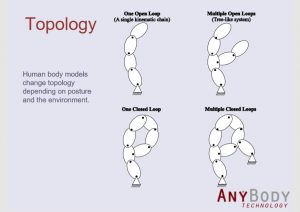
一般に、Anybodyのような剛体リンクモデルにおける剛体同士の連結は、『キネマティック・チェイン(運動連鎖)』と呼ばれます。
キネマティック・チェインは、オープンなもの(開放性)と、クローズドなもの(閉鎖性)に分類されますが、リンクの端部、例えば遠位端(手先)が自由に動く場合、それはオープンチェインとよばれ、一方で、チェーン(リンク)の両端に動作的な制限がある場合、クローズドチェイン(クローズドリンク)と呼ばれます。
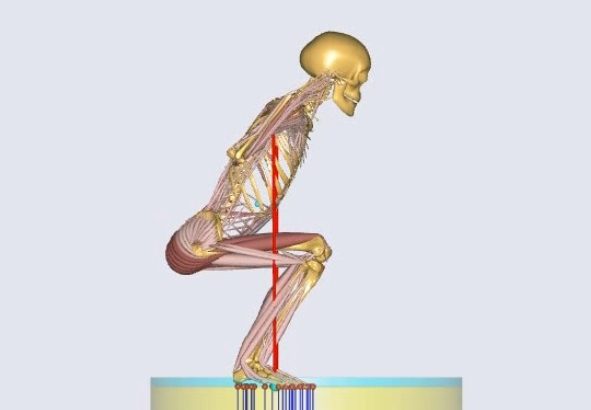
一般に、剛体リンクの場合、クローズドチェインとなる動作の場合、運動解析上、自由度 < 拘束数 のいわゆる「過剰な拘束(Over-Determinate)」となるため、厳密には数学的に解を求めることはできません。
また、逆動力学解析の観点からも、両(複数)固定端に対して反力の加重分配のパターンが無限に存在する、冗長な系の「不静定」問題となります。
クローズドチェイン問題の解決
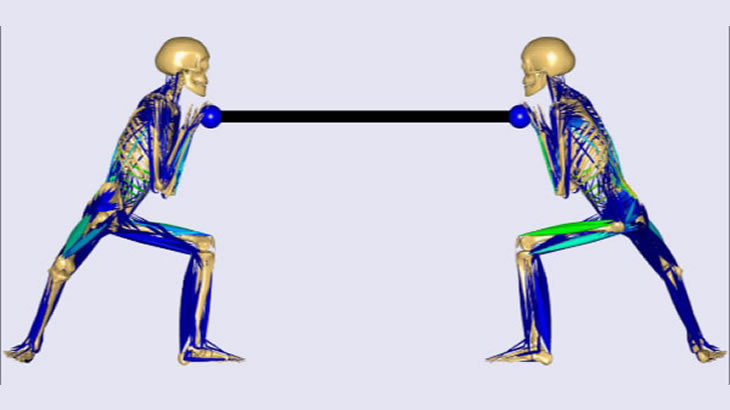
AnyBodyでは、「ソフト拘束」オプションによって運動解析を解消し、筋分配アルゴリズムの拡張による『仮想筋』の概念により、 冗長系の力学問題を解消します。
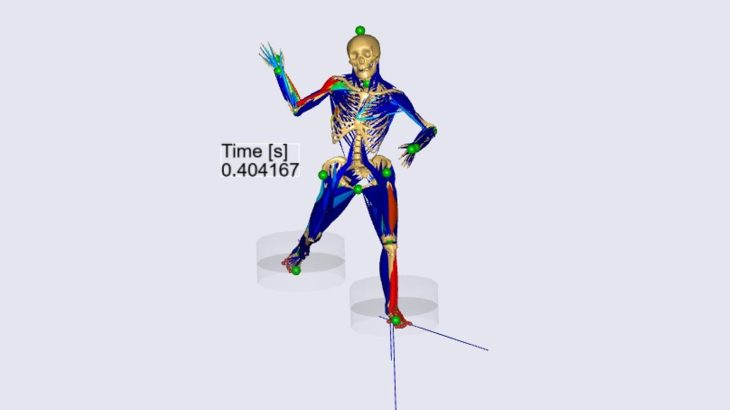
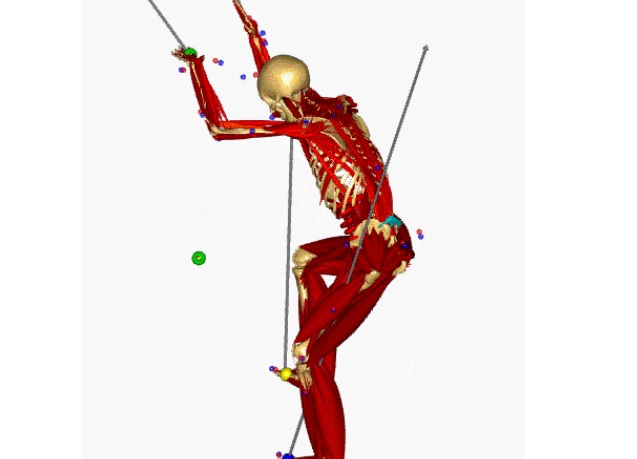
ここでは、クローズドな状態が連続する『はしご昇り』の解析をご紹介します。両手・両足を巧みにつかって梯子を昇る被験者動作の解析です。
この動作において、オープンチェイン(ループ)な状態になるタイミングは、きわめてまれです。
しいて言うなら、できるかはともかく「片足立ち」、「片手掴まり」の状態のときでしょうか。アクロバティックな動作は抜きにして、通常は、たいてい、両手両足のうち、2か所以上(安定して昇るには3か所でしょうか・・)が、はしごに接していることでしょう。
この状態は、一般には、運動解析・逆動力学解析は困難なものとなります。なぜなら、例えば両手両足でしがみついている(ように見える)とき、手足4か所への体重の分配を見つけることは、ある条件を付加しない限りできないからです。
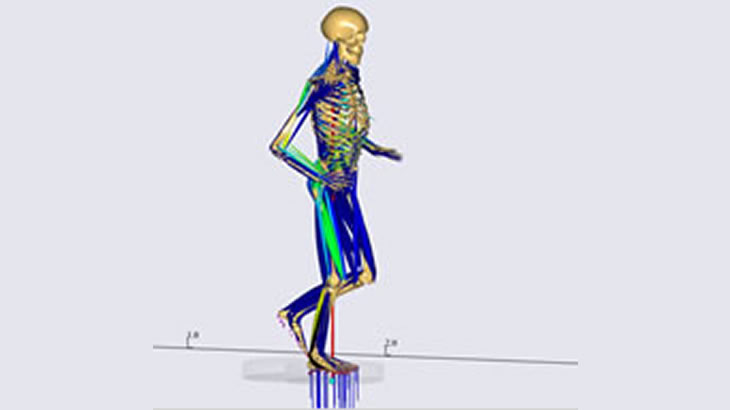
Anybodyでは、両手・両足が、はしごにかかる・離れるタイミングで、人とはしごをつなぐ『仮想筋』のONーOFFを切り替えます。それだけでなく、例えば、以下図のように接触度合い(横軸)によって、分配度をスムーズに調整可能です。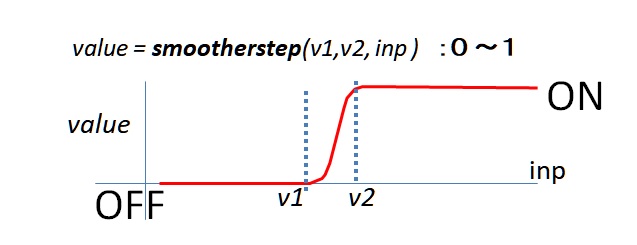 これと、
これと、
●実際の測定に即した人の動作(速さ変化(慣性力)や位置・姿勢)を考慮
さらには、
●手/足で同時に保持する場合の、標準的な人間の体重配分バランス(通常 足>手)を考慮
したより現実的な「はしごへの適切な体重のあずけ方」を算出しますので、一連の「はしご昇り動作」の解析が可能となります。