歩行解析
歩行解析は、患者の診断や治療において重要な役割があります。
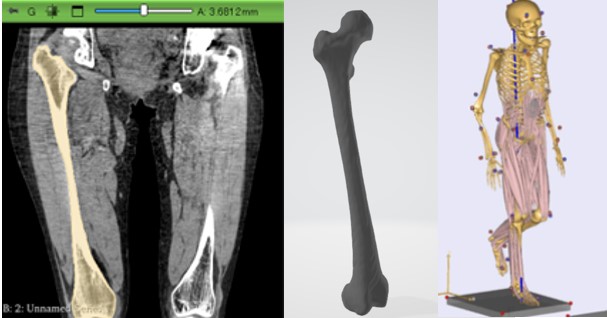
ある歩行研究所には、一定の間隔を空けて配置された複数のマーカーの動きを記録する動作追跡システムが備え付けられています。
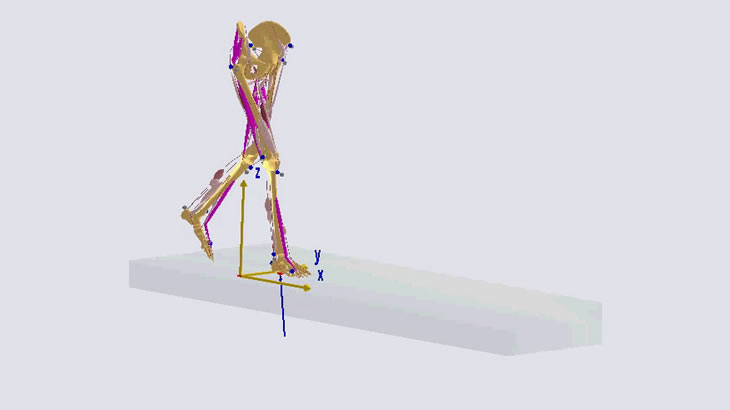
これらのマーカーは患者の脚に固定され、患者の動きをコンピュータモデルに精密に再現することができます。さらに、歩行する土台からは、足底が受ける地面 反力を記録します。これらの二つの情報は、AnyBody を利用した筋骨格解析にとって理想的な入力値となります。
最新のAnyBodyの機構解析機能では、測定されたマーカー位置によってモデルを直接動かすことができます。上の図では、モデルについた点がマーカーとして表示されています。足底には地面反力がかかり、このモデルの個々の筋や関節にかかる負荷を計算することができます。
上のグラフは、歩行周期と膝関節にかかる力のシミュレーション結果です。赤と緑の曲線は、前方/後方および垂直方向の反作用力を個々に示しています。その他の曲線は、横方向の反作用力およびジョイントの反作用モーメントを示しています。
車椅子の設計
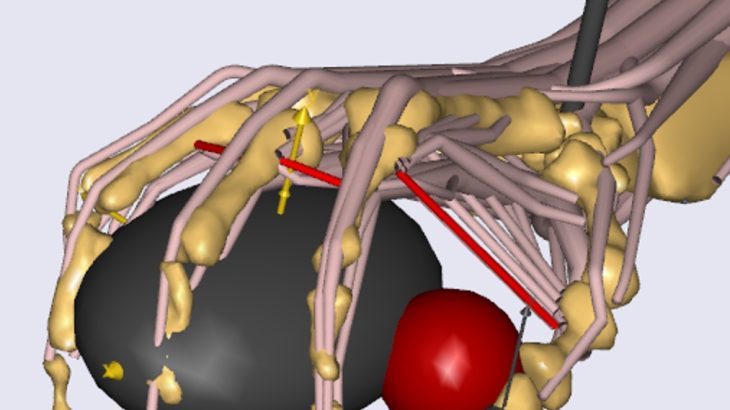
身体に合わない車椅子に乗ると、肩に負担がかかって痛みを伴います。この痛みはその車椅子を何年か利用した後に起こり、移動時に腕の力に頼るしかな い利用者 にとっては深刻な状態になる可能性があります。それでは、車輪径、駆動輪の位置、車輪軸の位置、車輪の傾斜といった車椅子の機構は、どのように利用者の肩 に影響するでしょうか。

このような検証は、実際には設計を変更して数年を経ないとどう影響するかを判断できません。実験で有効性を確認することは不可能な上、実験用に設計 した車椅子を使い続けさせることは倫理的に許されることではありません。つまり車椅子の設計が人体の負荷にどのように影響するかを知る方法は、コンピュー タ・シミュレーション以外にはありません。
右に描かれたモデルは、駆動輪を前方に押したとき、車軸位置の機能として働く関節窩(かんせつか)上腕関節にかかる力を解析しています。
整形外科インプラント
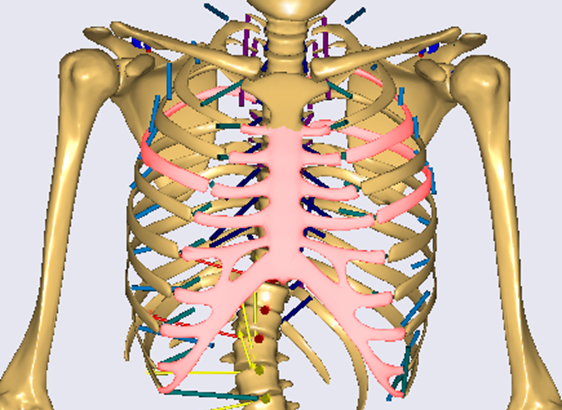
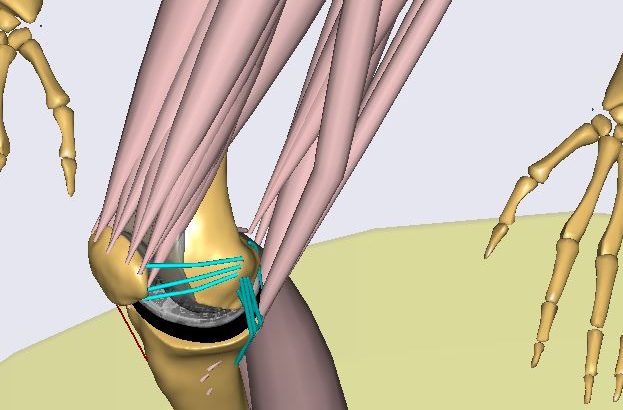
骨折支持プレートや人工関節などの整形外科インプラント埋め込み手術では、人体のメカニズムを物理的に人工物に置き換えます。人体のメカニズムは複雑で、いまだ解明されていない領域も多く、術後経過の予測精度を向上させる臨床研究が多数おこなわれています。

筋骨格シミュレーションを利用して、術後の筋肉の状態が外圧のバランスを保てるかどうか、また、インプラントが周辺組織に過大な負荷を与えないかなどを予測することができます。