AnyBody通信 Vol.2 ヒトの身体活動と筋シナジー
前回のコラムでは、AnyBodyが労働衛生の分野でどのように活用されているかを紹介しました。今回は「ヒトの身体活動と筋シナジー」について解説し、あわせて当社の取り組みを紹介します。
![]()
ヒトの身体活動はどう制御されているか
私たち人間は日々の生活のなかで特に意識することなく、歩く・食べる・座るといった活動を行っています。しかし、これらの身体活動はどのように制御されているのかを考えたことのある人は少ないのではないでしょうか。例えば、私たちが何気なく行っている「歩く」という動作が成立するには、全身に存在する600以上の筋肉を適切に制御する必要があります。これだけ多くの筋肉を制御する必要のある身体活動を、私たちは特に意識することなく簡単に行っています。
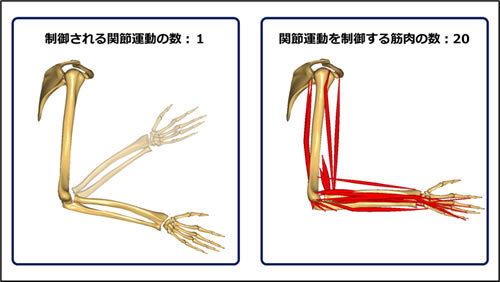
実は、この「身体活動がどのように制御されているのか」という疑問は、身体運動学の分野では「ベルンシュタイン問題」と呼ばれる難問として知られています。ベルンシュタイン問題とは、簡単にいうと「制御される側である関節運動に対して制御する側の筋肉の数が圧倒的に多いため、身体活動を成立させる関節運動がどのように制御されているかわからない」というものです。

筋シナジー仮説がベルンシュタイン問題を解決する
この説に従えば、600以上の筋肉の1つ1つを制御しつつ「歩く」という動作を成立させるのはほぼ不可能、ということになります。しかし、600の筋肉を機能的に紐づけられた幾つかの塊として扱うことができたらどうでしょうか?この考え方は「筋シナジー仮説」とよばれており、近年、ベルンシュタイン問題を解決できる可能性がある理論的枠組みとして注目を集めています。
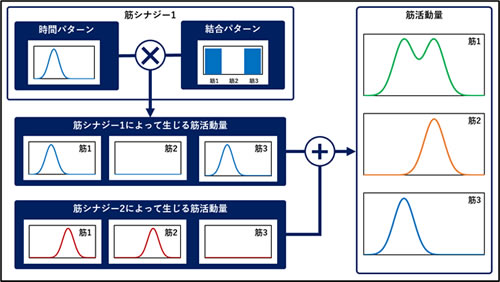
筋シナジー仮説では「ヒトは600以上の筋肉1つ1つを制御しているのではなく、少数の機能的に連結した筋活動の塊、『筋シナジー』を制御している」と考えます。この筋シナジーは直接計測することが不可能なため、筋電図(EMG)によって計測された筋活動量に非負値行列因子分解(Non negative matrix facrarization: NNMF)などの多変量解析を適応して推定するのが一般的です。
![]()
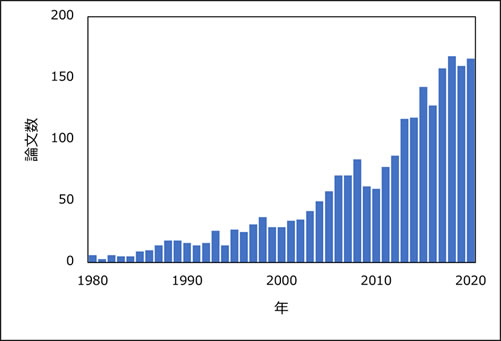
近年、この筋シナジー仮説に基づく解析は神経生理学・ロボット工学分野など多肢にわたる学術分野で注目を集めています。生物・医学系で活用されている論文検索サービス Pubmed(https://pubmed.ncbi.nlm.nih.gov/)で「muscle synergy」と検索した際にヒットする各年ごとの論文数の推移を下図に示します。図からわかるように、筋シナジーを扱った論文は毎年増加しています。

筋シナジー解析を拡張するAnyBodyの可能性
このように、非常に有益な情報をもたらしてくれる筋シナジーですが、次のような問題があります。
1) 筋電図(EMG)による筋活動量の取得は時間的・金銭的コストがかかる
2) 身体の全ての筋活動量を同時に計測することは難しい
3) 身体深部に存在する筋(腸腰筋など)を非侵襲的に計測できない
そして、AnyBodyでこれらが緩和・解消できるという見通しがあります。
1) AnyBodyでは生体の筋活動量に類似した筋活動量が推定できる
2) 筋シナジーの同定手法はAnyBodyで得られる筋活動量にも適応できる
当社ではAnyBodyと筋シナジーを融合させた解析手法を開発中です。現在、解析手法の実装がほぼ終わり、妥当性の検証を行っています。この技術が実用レベルに到達すれば、筋シナジーの解析が筋電図(EMG)を使わず簡便に実施でき、大きなメリットが生まれるでしょう。 続報にご期待ください。
関連記事/関連ページ
●AnyBody通信 Vol.3 歩行の消費エネルギーの計算
●AnyBody通信 Vol.1 人間の作業と自動化
●筋骨格ソフト AnyBody 紹介ページ